BOSM-1601 Wytaczarka z przeciwstawną głowicą
1. Wykorzystanie sprzętu
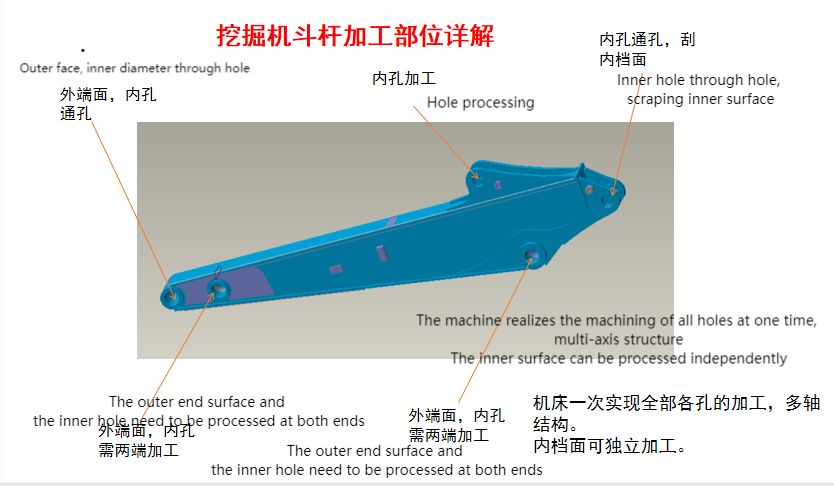
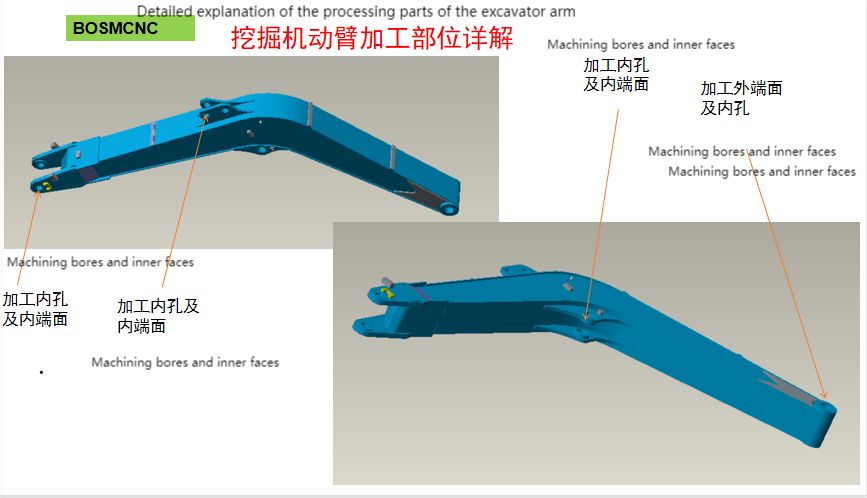
BOSM-1601 dwustanowiskowa kolumna sterowania numerycznego mobilna dwukolumnowa wytaczarko-frezarka to specjalna maszyna do symetrycznych elementów maszyn budowlanych.Maszyna jest wyposażona w specjalne ruchome kolumny i dwa zestawy poziomych siłowników, które mogą wykonywać wiercenie, frezowanie, wytaczanie i inną obróbkę przedmiotu w efektywnym zakresie skoku, przedmiot obrabiany może być obrabiany w miejscu w jednym czasie (nie ma potrzeby dodatkowego mocowanie), szybka prędkość załadunku i rozładunku, duża prędkość pozycjonowania, wysoka dokładność przetwarzania i wysoka wydajność przetwarzania.
2. Główne elementy Maszyny
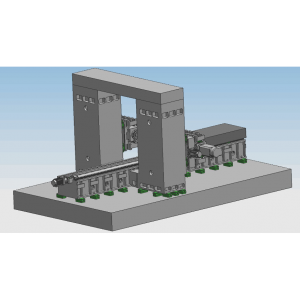
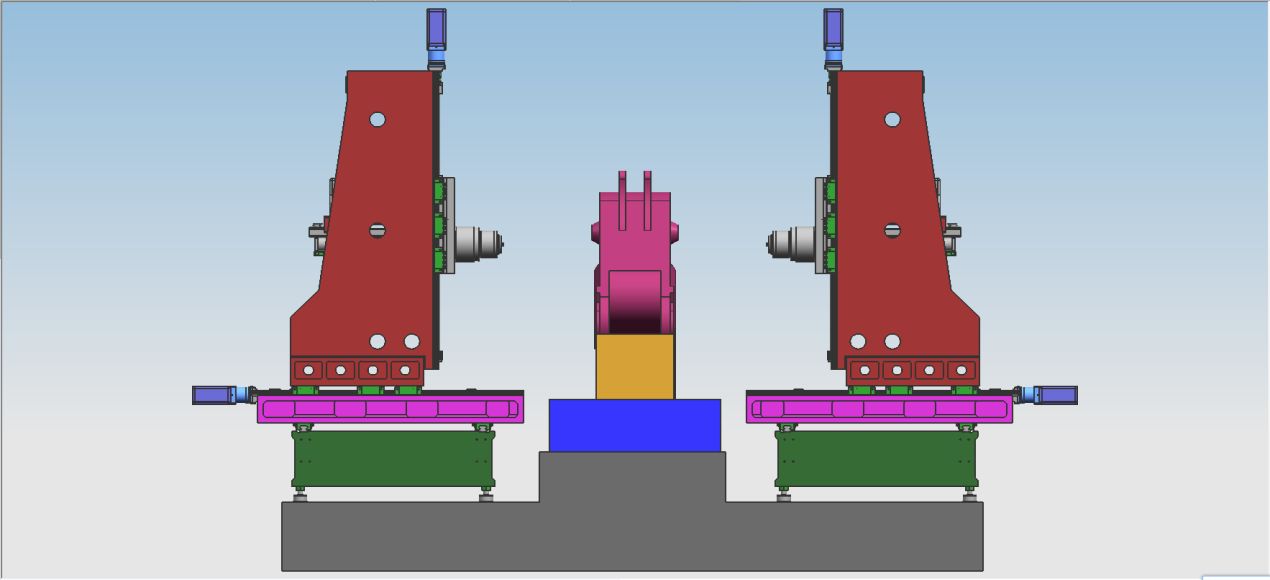
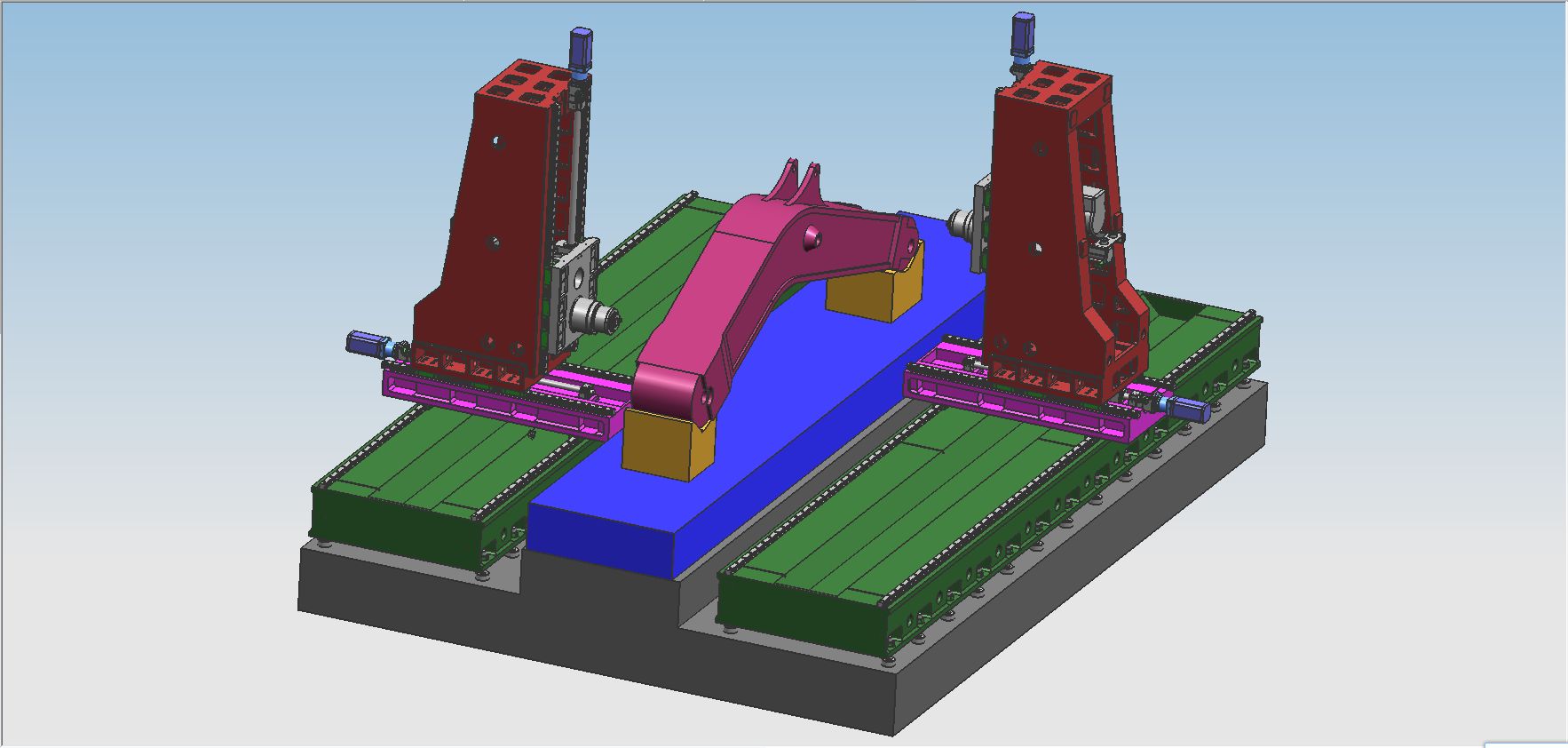
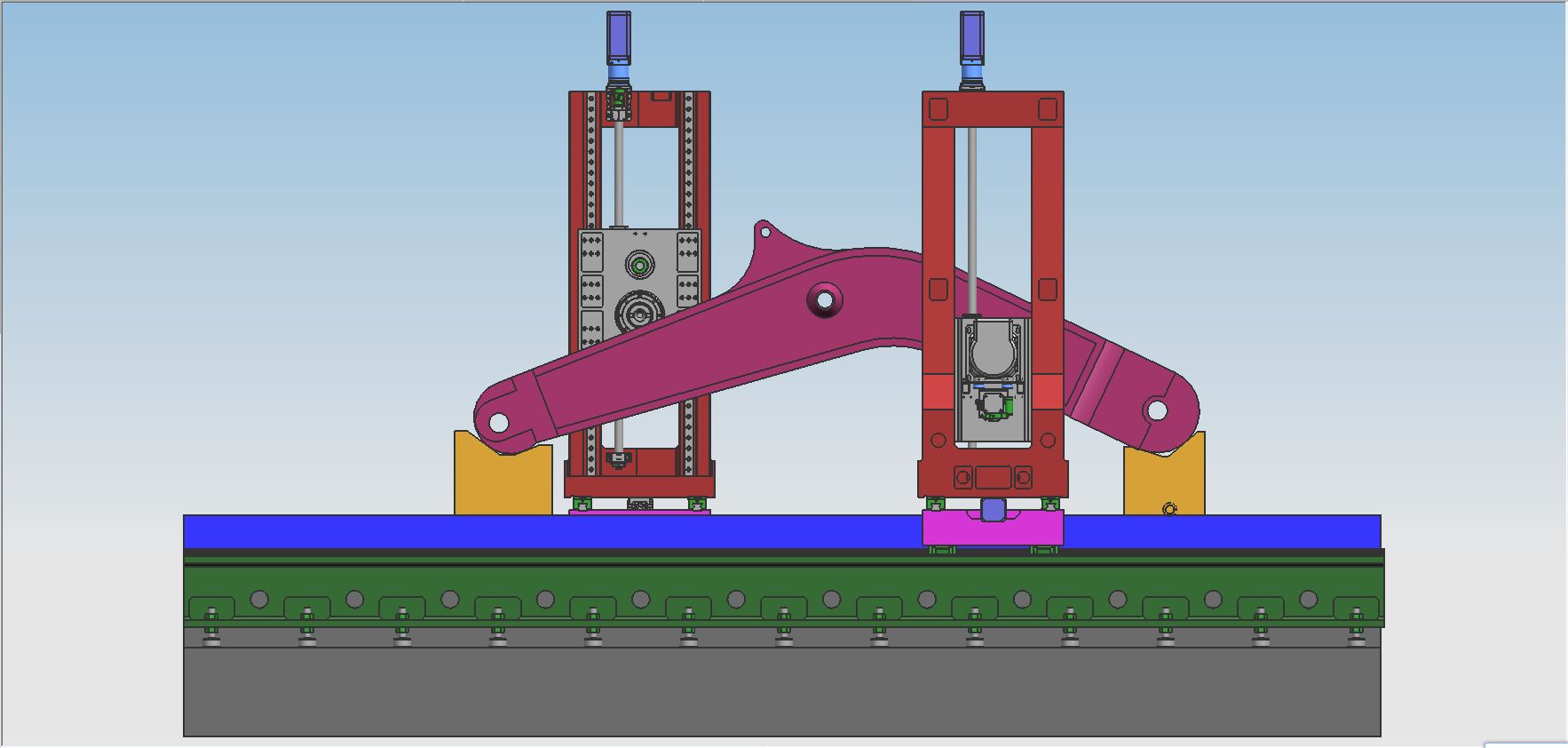
Łóżko, stół warsztatowy, lewa i prawa kolumna, belki, siodła, barany i inne duże części są wykonane z formowania piasku żywicznego, wysokiej jakości odlewu z żeliwa szarego 250, wyżarzanego w gorącej piaskownicy → starzenie wibracyjne → wyżarzanie w gorącym piecu → starzenie wibracyjne → obróbka zgrubna → Starzenie wibracyjne → wyżarzanie w gorącym piecu → starzenie wibracyjne → wykończenie, całkowicie wyeliminuj negatywne naprężenia części i utrzymuj stabilną wydajność części.Maszyna ma takie funkcje, jak frezowanie, wytaczanie, wiercenie, pogłębianie, gwintowanie itp., A metodą chłodzenia narzędzia jest chłodzenie zewnętrzne. Maszyna zawiera 6 osi posuwu, które mogą realizować 4-osiowe połączenie i 6-osiowe pojedyncze działanie.Istnieją 2 głowice mocy.Kierunek osiowy maszyny i głowicy napędowej pokazano na poniższym rysunku.
2.1Główna konstrukcja osiowej części zasilającej przekładni
2.1.1 oś X1/X2:Kolumna porusza się ruchem postępowo-zwrotnym wzdłuż szyny prowadzącej nieruchomego łóżka.
Przekładnia osi X: Precyzyjny reduktor planetarny, napędzany i kontrolowany przez serwosilnik prądu przemiennego, napędza dwie kolumny, aby poruszały się liniowo wzdłuż osi X przez parę przekładni śrubowo-tocznych.
Forma szyny prowadzącej: Dwie precyzyjne prowadnice liniowe o wysokiej wytrzymałości są ułożone płasko.Klasa precyzji śruby kulowej w parze transmisyjnej to C5.
2.1.2 oś Y1/Y2:Głowice wytaczarsko-frezarskie I, II i ich kolumny są odpowiednio zamontowane na szynach prowadzących podstawy o wysokiej wytrzymałości po obu stronach i poruszają się ruchem posuwisto-zwrotnym wzdłuż szyn prowadzących podstawy wzdłuż osi Y1 i Y2.Serwosilnik prądu przemiennego służy do napędzania i sterowania parą przekładni śrub kulowych, przeciągania siodła w celu poruszania się i realizowania ruchu liniowego wzdłuż osi Y.
Forma szyny prowadzącej: 4 prowadnice liniowe + napęd ze śrubą kulową.Stopień dokładności śruby kulowej w parze transmisyjnej wynosi C5 i przyjęto sterowanie w pętli półzamkniętej.
2.1.3 oś Z1/Z2:Głowice wytaczarsko-frezarskie I, II i ich przesuwne siodełka są zamontowane pionowo na przednich końcach kolumn po obu stronach i poruszają się ruchem posuwisto-zwrotnym wzdłuż osi Z1 i Z2 w górę iw dół szyn prowadzących kolumn.
Przekładnia osi Z1: serwosilnik prądu przemiennego służy do napędzania i sterowania wysoce precyzyjnym reduktorem planetarnym i parą przekładni śrubowo-tocznych, a siłownik jest napędzany, aby poruszać się liniowo wzdłuż osi Z.
Forma szyny prowadzącej: przyjęto 2 liniowe konstrukcje szyn prowadzących.Klasa dokładności śruby kulowej w parze transmisyjnej to C5.
2.2 Usuwanie i chłodzenie wiórów
Po obu stronach pod stołem roboczym zainstalowane są spiralne i płaskie przenośniki wiórów, a wióry mogą być automatycznie przenoszone do przenośnika wiórów na końcu przez dwa etapy płyt spiralnych i łańcuchowych w celu realizacji cywilizowanej produkcji.W zbiorniku chłodziwa przenośnika wiórów znajduje się pompa chłodząca, której można użyć do zewnętrznego chłodzenia narzędzia, aby zapewnić wydajność i żywotność narzędzia, a chłodziwo można poddać recyklingowi.
3.W pełni cyfrowy system sterowania numerycznego:
3.1.Dzięki funkcji łamania wiórów czas łamania wiórów i cykl łamania wiórów można ustawić na interfejsie człowiek-maszyna.
3.2.Wyposażony w funkcję podnoszenia narzędzi, odległość podnoszenia narzędzia można ustawić na interfejsie człowiek-maszyna.Po osiągnięciu odległości narzędzie jest szybko podnoszone, następnie wióry są odrzucane, a następnie szybko przekazywane na powierzchnię wiercenia i automatycznie przestawiane do pracy.
3.3.Scentralizowana skrzynka sterownicza i jednostka ręczna przyjmują system sterowania numerycznego i są wyposażone w interfejs USB i wyświetlacz ciekłokrystaliczny LCD.Aby ułatwić programowanie, przechowywanie, wyświetlanie i komunikację, interfejs operacyjny ma takie funkcje, jak dialog człowiek-maszyna, kompensacja błędów i automatyczny alarm.
3.4.Sprzęt ma funkcję podglądu i ponownej kontroli pozycji otworu przed obróbką, a operacja jest bardzo wygodna.
4.Automatyczne smarowanie
Precyzyjne pary prowadnic liniowych maszyn, pary precyzyjnych śrub kulowych i inne pary precyzyjnych ruchów są wyposażone w automatyczne systemy smarowania.Automatyczna pompa smarująca wyprowadza olej pod ciśnieniem, a komora olejowa smarownicy ilościowej wchodzi do oleju.Po napełnieniu komory olejowej olejem, gdy ciśnienie w układzie wzrośnie do 1,4-1,75 MPa, wyłącznik ciśnieniowy w układzie zostaje zamknięty, pompa zatrzymuje się, a jednocześnie zawór odciążający zostaje odciążony.Gdy ciśnienie oleju w jezdni spadnie poniżej 0,2 MPa, smarownica ilościowa zaczyna napełniać punkt smarowania i kończy jedno napełnienie olejem.Dzięki dokładnemu doprowadzeniu oleju do ilościowego wtryskiwacza olejowego oraz wykrywaniu ciśnienia w układzie, zasilanie olejem jest niezawodne, zapewniając tworzenie się filmu olejowego na powierzchni każdej pary kinematycznej, zmniejszając tarcie i zużycie oraz zapobiegając uszkodzeniom wewnętrzną strukturę spowodowaną przegrzaniem., aby zapewnić dokładność i żywotność Maszyny.W porównaniu z parą prowadnic ślizgowych, para prowadnic liniowych tocznych zastosowana w tej maszynie ma szereg zalet:
① Wysoka czułość ruchu, współczynnik tarcia tocznej szyny prowadzącej jest mały, tylko 0,0025-0,01, a moc napędowa jest znacznie zmniejszona, co odpowiada tylko 1 zwykłej maszynie./10.
② Różnica między tarciem dynamicznym i statycznym jest bardzo mała, a wydajność śledzenia jest doskonała, to znaczy odstęp czasu między sygnałem napędowym a działaniem mechanicznym jest bardzo krótki, co sprzyja poprawie szybkości reakcji i czułości system sterowania numerycznego. ③ Nadaje się do szybkiego ruchu liniowego, a jego chwilowa prędkość jest około 10 razy większa niż w przypadku prowadnic ślizgowych.④ Może realizować ruch bez przerw i poprawiać sztywność ruchu układu mechanicznego.⑤Wyprodukowany przez profesjonalnych producentów, ma wysoką precyzję, dobrą wszechstronność i łatwą konserwację.
5.Środowisko użytkowania maszyny:
5.1.Wymagania środowiskowe dotyczące użytkowania sprzętu
Utrzymanie stałego poziomu temperatury otoczenia jest istotnym czynnikiem dla precyzyjnej obróbki.
(1) Dostępne wymagania dotyczące temperatury otoczenia to -10°C do 35°C, gdy temperatura otoczenia wynosi 20°C, wilgotność powinna wynosić od 40% do 75%.
(2) Aby utrzymać dokładność statyczną Maszyny w określonym zakresie, optymalna temperatura otoczenia musi wynosić od 15°C do 25°C, a różnica temperatur
Nie może przekraczać ±2°C/24h.
5.2 Napięcie zasilania: 3-fazowe, 380V, w zakresie ±10% wahań napięcia, częstotliwość zasilania: 50HZ.
5.3 Jeżeli napięcie w obszarze roboczym jest niestabilne, Maszyna powinna być wyposażona w stabilizowane źródło zasilania w celu zapewnienia normalnej pracy Maszyny.
5.4 Maszyna powinna mieć niezawodne uziemienie: przewód uziemiający jest drutem miedzianym, średnica przewodu nie powinna być mniejsza niż 10 mm², a rezystancja uziemienia jest mała do 4 omów.
5.5 Aby zapewnić normalne działanie sprzętu, jeśli sprężone powietrze ze źródła powietrza nie spełnia wymagań źródła powietrza, należy je zainstalować na Maszynie.
Dodaj zestaw urządzeń do oczyszczania źródła powietrza (osuszanie, odtłuszczanie, filtrowanie) przed powietrzem.
5.6 Trzymaj sprzęt z dala od bezpośredniego światła słonecznego, źródeł wibracji i ciepła, generatorów wysokiej częstotliwości, spawarek elektrycznych itp., aby uniknąć awarii produkcji maszyny lub utraty dokładności maszyny.
6.parametry techniczne
| Model | 1601 | |
| Obróbka rozmiaru przedmiotu obrabianego | Długość × szerokość × wysokość (mm) | 16000×1000×1500 |
| Maksymalny posuw maszyny | Szerokość (mm) | 1300 |
| Rozmiar biurka | Długość X Szerokość (mm) | 16000*1000 |
| Podróż kolumny | Kolumna porusza się tam iz powrotem (mm) | 1600 |
| Wrzeciono w górę iw dół | Skok w górę iw dół (mm) | 1500 |
| Wysokość od środka wrzeciona do płaszczyzny stołu | 100-1600mm | |
| Poziome wrzeciono o wysokiej wytrzymałości głowa mocy jeden dwa | Ilość (2) | 2 |
| Stożek wrzeciona | BT50 | |
| Iglica | Automatyczne przeciąganie, ręczna zmiana narzędzia | |
| Średnica frezu (mm) | ≤Φ200 | |
| Średnica gwintowania (mm) | M3-M30 | |
| Prędkość wrzeciona (r/min) | 30~3000 | |
| Moc silnika wrzeciona serwo (kw) | 30*2 | |
|
| Odległość przesuwu w lewo iw prawo między dwoma końcami wrzeciona | 400-1600mm |
| Lewy i prawy skok podwójnych kolumn (mm) | 600 każdy | |
| Chłodzenie narzędzi | Chłodzenie wewnętrzne, chłodzenie zewnętrzne | |
| Dwukierunkowa dokładność pozycjonowania | 300 mm | ±0,032 |
| Dwukierunkowa powtarzalna dokładność pozycjonowania | 300 mm | ±0,025 |
| Wymiary maszyny | Długość × szerokość × wysokość (mm) | Zgodnie z rysunkami (jeśli nastąpią zmiany w procesie projektowania, poinformujemy Cię o tym) |
| Masa brutto (t) | 72T | |