






BOSM -Wiertarka i wytaczarka pozioma
1. Użycie sprzętu:
Pozioma wiertarka i wytaczarka BOSM to specjalna maszyna dla Twojej firmy do obróbki czapek żurawi wieżowych. Maszyna wyposażona jest w 2 zestawy poziomych głowic wiertarsko-wytaczarskich, które umożliwiają wiercenie, frezowanie i wytaczanie detali w efektywnym zakresie skoku. Cięcie i inna obróbka, prędkość pozycjonowania sprzętu jest szybka, dokładność przetwarzania jest wysoka, a wydajność przetwarzania jest wysoka.
2. Charakterystyka konstrukcji sprzętu:
2. 1. Główne elementyMaszyna
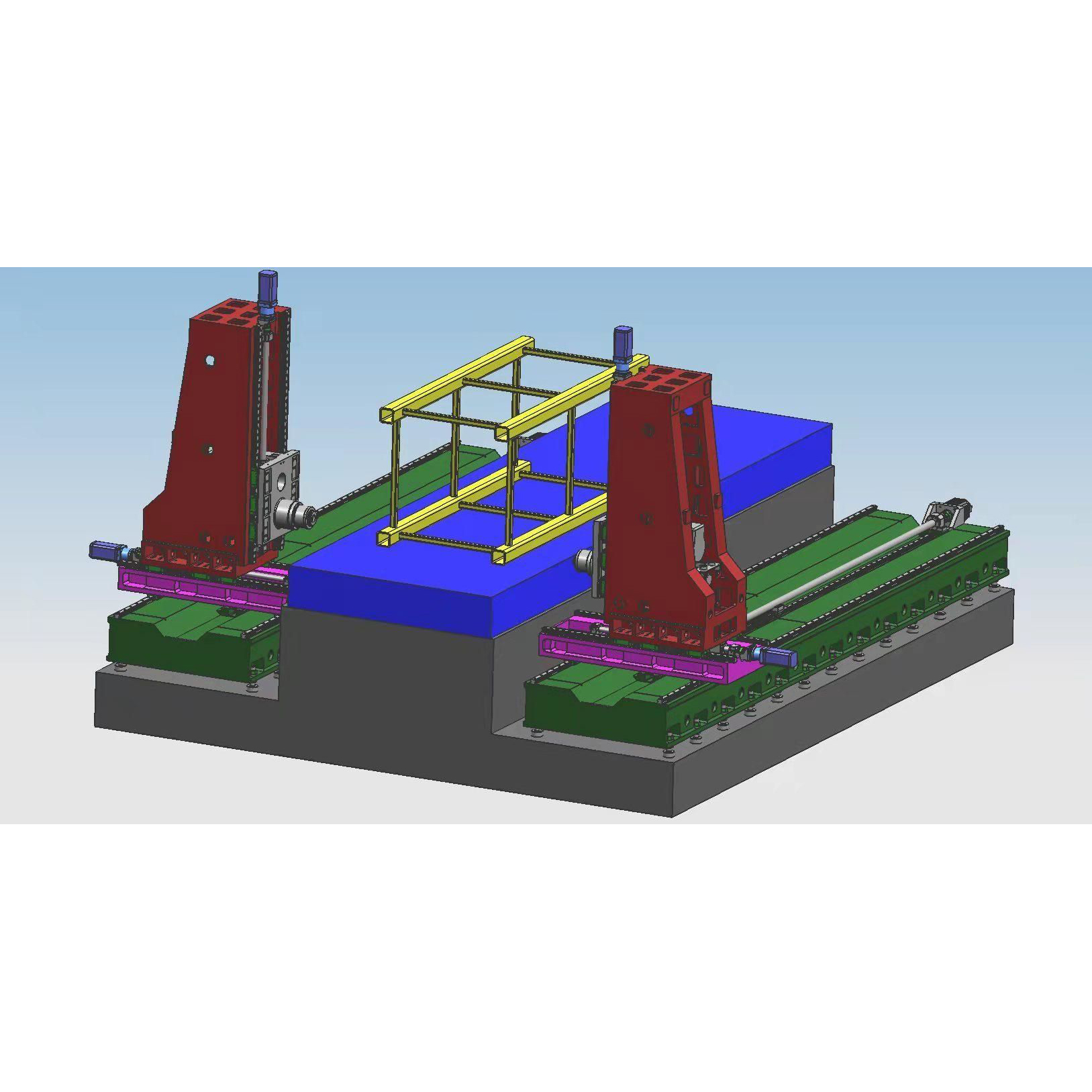
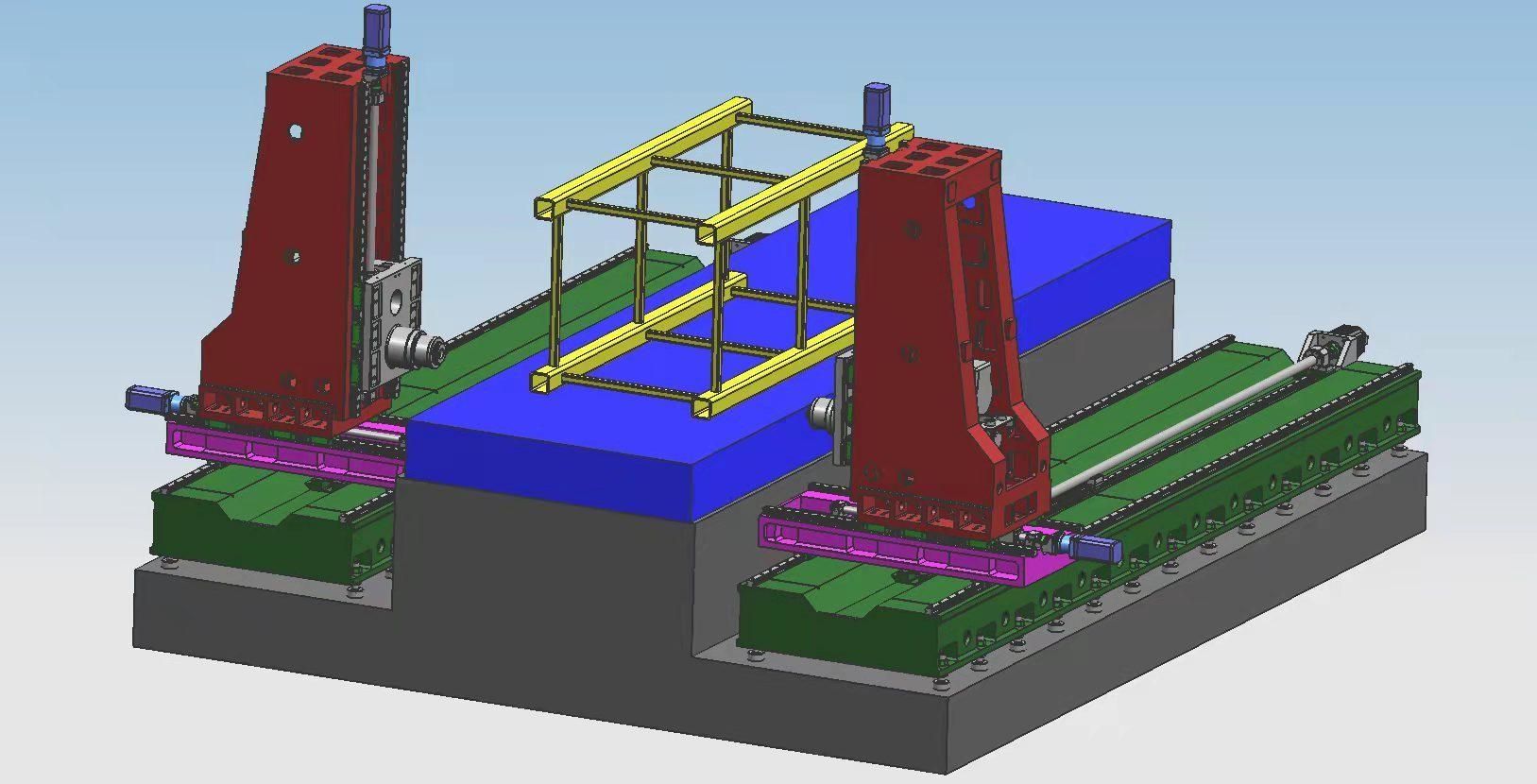
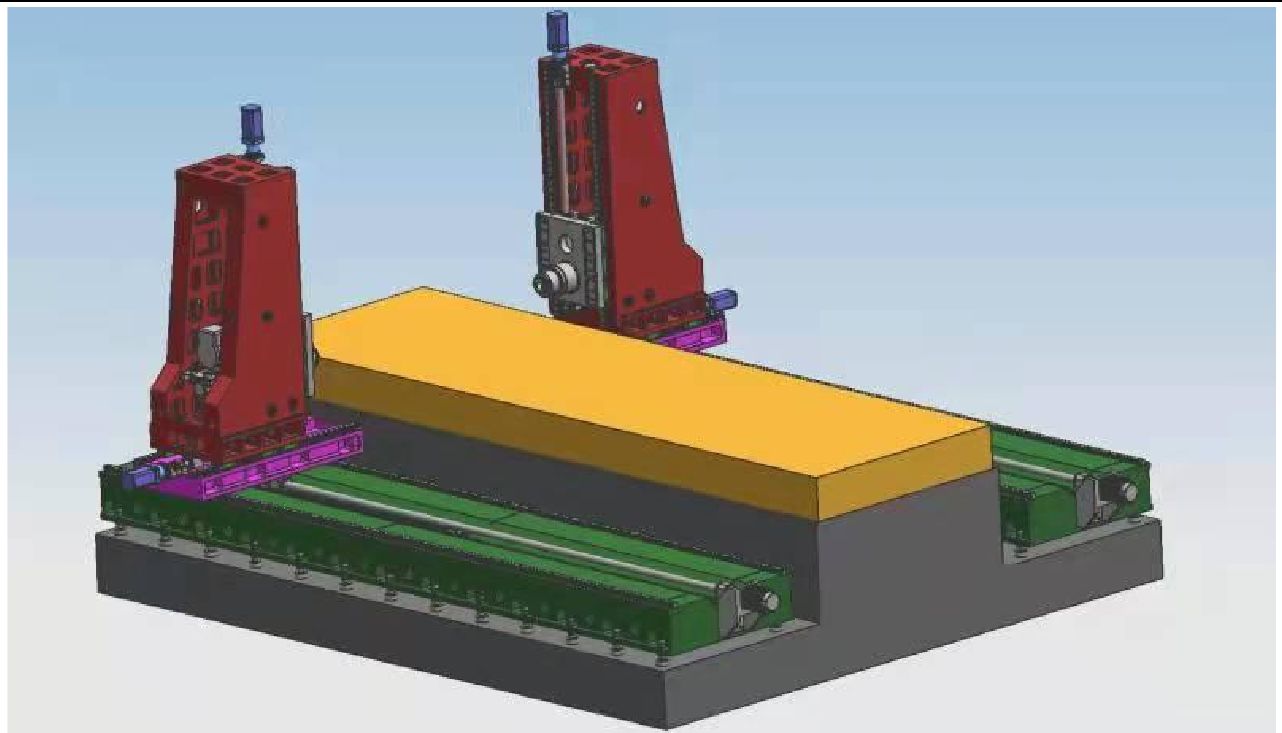
Główne elementy maszyny: łoże, stół roboczy, lewa i prawa kolumna, siodła, siłowniki itp., duże części wykonane są z formowania piaskiem żywicznym, wysokiej jakości odlewu z żeliwa szarego 250, wyżarzanego w gorącej piaskownicy → starzenie wibracyjne → gorąco wyżarzanie w piecu → starzenie wibracyjne → obróbka zgrubna → starzenie wibracyjne → wyżarzanie w piecu → starzenie wibracyjne → obróbka wykańczająca, aby całkowicie wyeliminować ujemne naprężenia części i utrzymać stabilną wydajność części. Stół warsztatowy urządzenia jest nieruchomy, a głowice napędowe po obu stronach mogą poruszać się w przód i w tył podstawy; Maszyna posiada funkcje takie jak wiercenie, wytaczanie, pogłębianie, gwintowanie itp. Metodą chłodzenia narzędzia jest chłodzenie wewnętrzne plus chłodzenie zewnętrzne. Maszyna zawiera 5 osi posuwu, 2 głowice tnące, które mogą być synchronizowane z 5 osiami jednocześnie lub mogą być jednostronnego działania. Kierunek osiowy maszyny i głowicy napędowej pokazano na poniższym rysunku.
2. 2 Główna konstrukcja części zasilającej przekładni osiowej
2.2.1 Oś X: Głowica napędowa porusza się ruchem posuwisto-zwrotnym w bok wzdłuż szyny prowadzącej podstawy.
Napęd osi X1: serwosilnik prądu przemiennego oraz precyzyjny reduktor planetarny służą do napędzania głowicy napędowej przez napęd śruby kulowej w celu realizacji ruchu liniowego osi X.
Przekładnia osi X2: serwosilnik prądu przemiennego oraz precyzyjny reduktor planetarny służą do napędzania głowicy napędowej poprzez przekładnię śrubową toczną w celu realizacji ruchu liniowego w osi X.
Forma prowadnicy: Dwie precyzyjne prowadnice liniowe o wysokiej wytrzymałości są ułożone na rozszerzonej podstawie.
2.2 Oś Y1: Głowica napędowa porusza się ruchem posuwisto-zwrotnym w górę i w dół na kolumnie.
Napęd osi Y1: Zastosuj serwomotor prądu przemiennego do napędzania śruby kulowej w celu realizacji ruchu liniowego osi Y1. Forma prowadnicy: 4 sztuki prowadnic liniowych typu 45.
2.2.3 Oś Y2: Głowica napędowa porusza się ruchem posuwisto-zwrotnym w górę i w dół na kolumnie.
Przekładnia osi Y2: Serwosilnik prądu przemiennego służy do napędzania śruby kulowej w celu realizacji ruchu liniowego osi Y1.
Forma prowadnicy: 4 sztuki prowadnic liniowych typu 45.
2.2.4 Oś Z1: Głowica napędowa wykonuje ruch posuwisto-zwrotny na siodełku.
Przekładnia osi Z1: Serwomotor prądu przemiennego i precyzyjny reduktor planetarny służą do napędzania ruchu przez śrubę kulową w celu realizacji ruchu liniowego osi Z1.
2.2.5 Oś Z2: Głowica napędowa porusza się tam i z powrotem na siodle.
Przekładnia osi Z2: Serwomotor prądu przemiennego i precyzyjny reduktor planetarny służą do napędzania ruchu przez śrubę kulową w celu realizacji ruchu liniowego osi Z2.
2.3. Usuwanie wiórów i chłodzenie
Po obu stronach pod stołem warsztatowym zainstalowano przenośniki wiórów z płaskim łańcuchem, a wióry żelazne można na końcu odprowadzać do przenośnika wiórów, aby zrealizować cywilizowaną produkcję. W zbiorniku chłodziwa przenośnika wiórów znajduje się pompa chłodząca, która może być używana do chłodzenia wewnętrznego + chłodzenia zewnętrznego narzędzia, aby zapewnić wydajność i żywotność narzędzia, a chłodziwo można poddać recyklingowi.
3. W pełni cyfrowy system sterowania numerycznego:
3.1. Dzięki funkcji łamania wiórów czas łamania wiórów i cykl łamania wiórów można ustawić w interfejsie człowiek-maszyna.
3.2. Dzięki funkcji podnoszenia narzędzia odległość podnoszenia narzędzia można ustawić w interfejsie człowiek-maszyna. Po osiągnięciu tej odległości narzędzie zostanie szybko podniesione, po czym wióry zostaną wyrzucone, a następnie szybko przesunięte na powierzchnię wiercenia i automatycznie zamienione na pracę.
3.2. Scentralizowana skrzynka sterownicza i urządzenie ręczne wykorzystują system sterowania numerycznego i są wyposażone w interfejs USB i wyświetlacz ciekłokrystaliczny LCD. Aby ułatwić programowanie, przechowywanie, wyświetlanie i komunikację, interfejs operacyjny posiada takie funkcje, jak dialog człowiek-maszyna, kompensacja błędów i automatyczny alarm.
3.2.. Sprzęt posiada funkcję podglądu i ponownej kontroli położenia otworu przed obróbką, a obsługa jest bardzo wygodna.
4. Automatyczne smarowanie
Pary precyzyjnych prowadnic liniowych maszyn, pary precyzyjnych śrub kulowych i inne pary precyzyjnych ruchów są wyposażone w automatyczne systemy smarowania. Automatyczna pompa smarująca wyprowadza olej pod ciśnieniem, a komora ilościowego oleju smarującego wchodzi do oleju. Gdy komora olejowa zostanie napełniona olejem, a ciśnienie w układzie wzrośnie do 1,4~1,75Mpa, przełącznik ciśnienia w układzie zostanie zamknięty, pompa zatrzyma się, a zawór rozładowczy zostanie jednocześnie odciążony. Kiedy ciśnienie oleju w jezdni spadnie poniżej 0,2Mpa, smarownica ilościowa zaczyna napełniać punkt smarowania i kończy jedno napełnienie olejem. Dzięki precyzyjnej ilości oleju podawanej przez olejarkę ilościową oraz możliwości wykrywania ciśnienia w układzie, dopływ oleju jest niezawodny i zapewnia powstanie filmu olejowego na powierzchni każdej pary kinematycznej, co zmniejsza tarcie i zużycie oraz zapobiega uszkodzeniom do struktury wewnętrznej spowodowane przegrzaniem. , aby zapewnić dokładność i żywotność Maszyny.
5. Maszynaużyj środowiska:
Zasilanie: Trójfazowe AC380V±10%, 50Hz±1 Temperatura otoczenia: -10°~45°
6. Kryteria akceptacji:
JB/T10051-1999 „Ogólne specyfikacje techniczne układu hydraulicznego maszyn do cięcia metalu”
7. Parametry techniczne:
| Model | 2050-5Z | |
| Maksymalny rozmiar obrabianego przedmiotu | Długość × szerokość × wysokość (mm) | 5000×2000×1500 |
| wielkość biurka | Długość X Szerokość (mm) | 5000*2000 |
| Przesuw w kierunku podstawy głowicy napędowej | Poruszaj się tam i z powrotem (mm) | 5000 |
| Moc głowy w górę i w dół | Skok siłownika w górę i w dół (mm) | 1500 |
|
Głowica do wiercenia poziomego typu RAM Głowica napędowa 1 2 | Ilość (2 szt.) | 2 |
| Stożek wrzeciona | BT50 | |
| Średnica wiercenia (mm) | Φ2-Φ60 | |
| Średnica gwintowania (mm) | M3-M30 | |
| Prędkość wrzeciona (obr./min) | 30 ~ 3000 | |
| Moc silnika wrzeciona serwa (kw) | 22*2 | |
| Skok w lewo i w prawo (mm) | 600 | |
| Dokładność pozycjonowania dwukierunkowego | 300 mm * 300 mm | ±0,025 |
| Dwukierunkowa powtarzalna dokładność pozycjonowania | 300 mm * 300 mm | ±0,02 |





